Le NoRobo n’avance toujours pas malgré l’intensité de mes recherches et mon optimisme. Mais ça avance. Je comprends de mieux en mieux comment fonctionne la régulation PID.
Le NoRobo n’avance toujours pas malgré l’intensité de mes recherches et mon optimisme. Mais ça avance. Je comprends de mieux en mieux comment fonctionne la régulation PID.
Un sketch simple pour lire les données du gyroscope MPU6050 et les convertir avec le filtre complémentaire. Ca fonctionne, c’est bref !

Je poursuis les tentatives de faire fonctionner correctement le filtre complémentaire sur le gyroscope MPU6050. Ca va balancer !

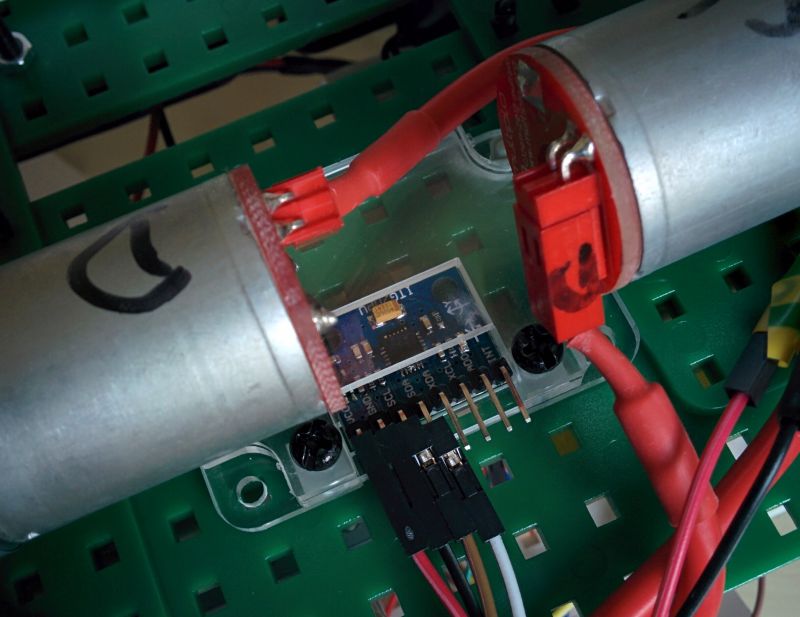
Aujourd’hui, je place le gyroscope MPU 6050 sur le NoRobo et je prépare le code pour connaitre l’inclinaison du robot vers l’avant ou vers l’arrière. Etape 1…
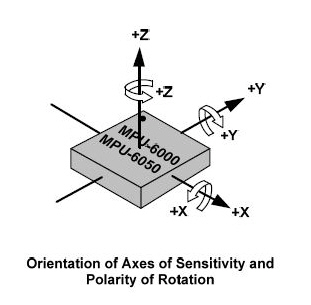
J’ajoute un gyroscope MPU-6050 au robot pour mesurer les angles de rotation et l’accélération en x, y et z. Je découvre aussi le protocole I2C de communication .

Le NoRobo fonctionne comme une voiture télécommandée par un joystick sur téléphone android : il avance et recule, tourne à gauche ou à droite. Voici les explications nécessaires.

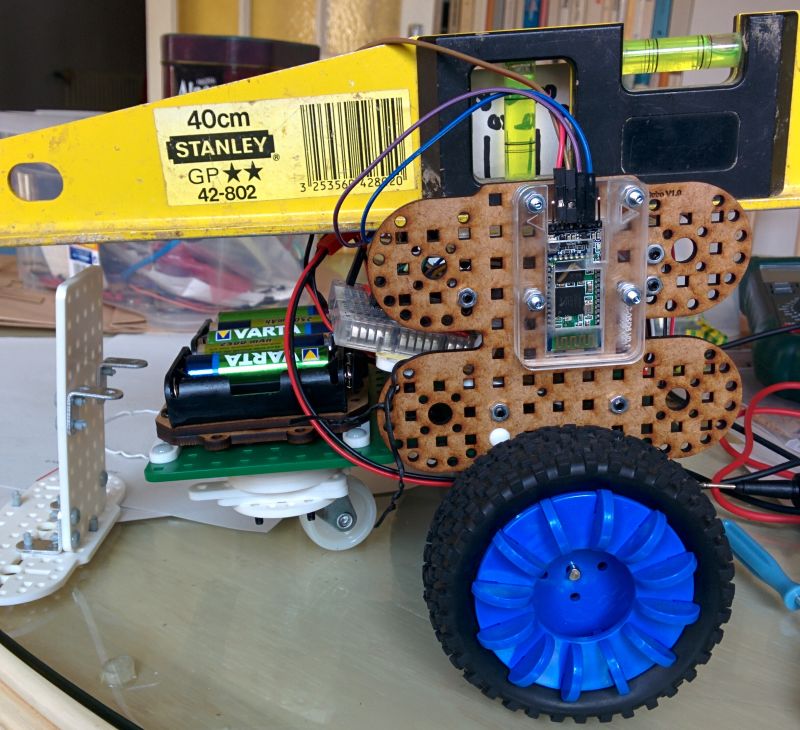
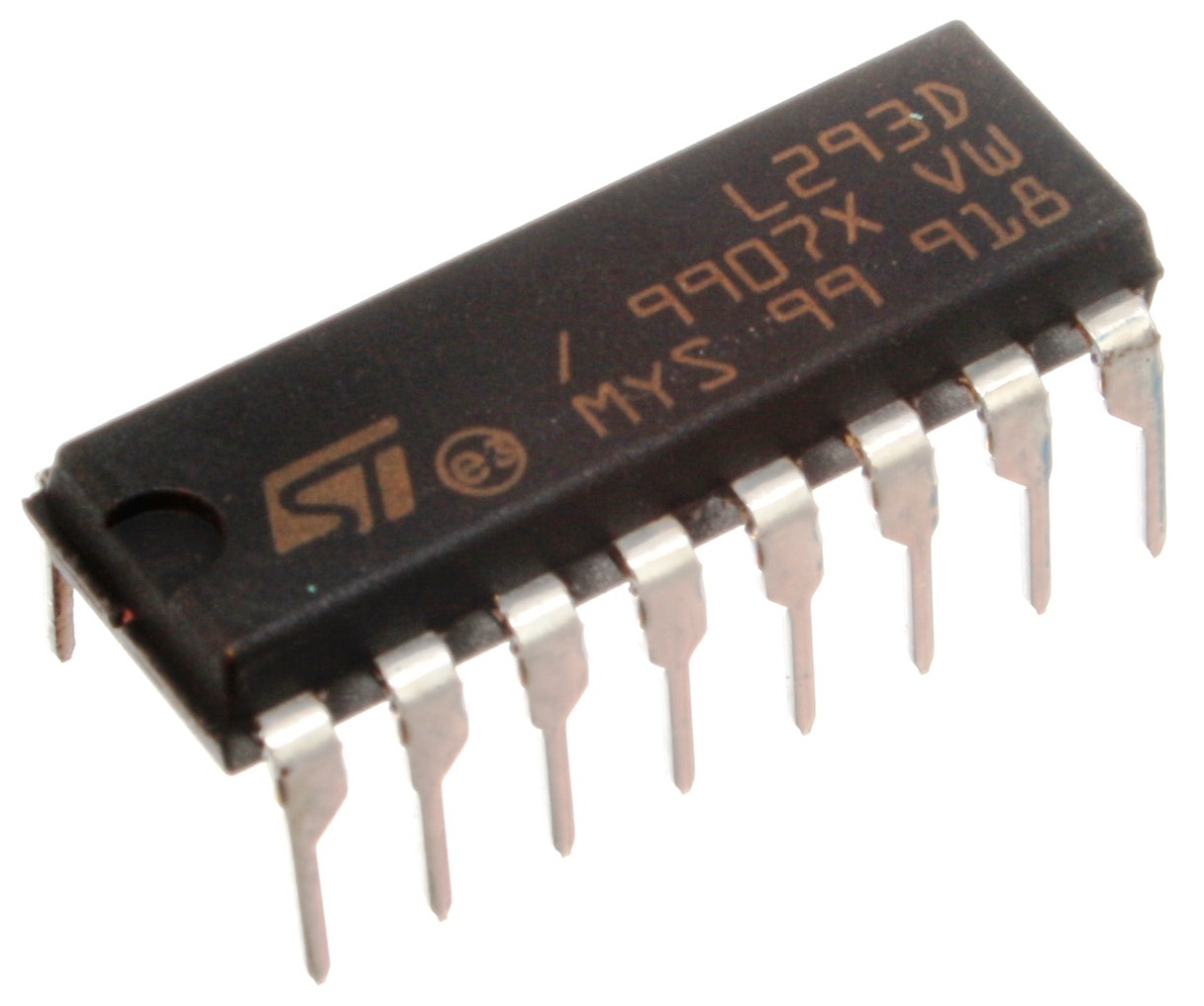
Construction d’un robot de base avec un arduino et environ 22 € de composants, dont deux moteurs DC et un pont en H L293d.
Première étape d’une série sur la construction d’un robot arduino pour apprendre.