par Anne-Laure DELPECH | 22 Mai 2016 | arduino
L’objectif de ce premier essai est de commander un store motorisé par le biais d’un arduino commandé en bluetooth d’un smartphone android.
L’objectif
Le moteur du store est relié à 4 fils (voir l’article de Fanch ici) :
- un fil jaune/ vert de terre
- un fil bleu de neutre
- un fil noir pour un des sens de rotation
- un fil marron pour l’autre sens
Le moteur contient des fins de course, on n’a donc pas besoin de les gérer.
L’objectif est donc de commander deux relais par l’intermédiaire d’un arduino équipé de bluetooth. Un relais sera relié au fil noir, l’autre au fil marron.
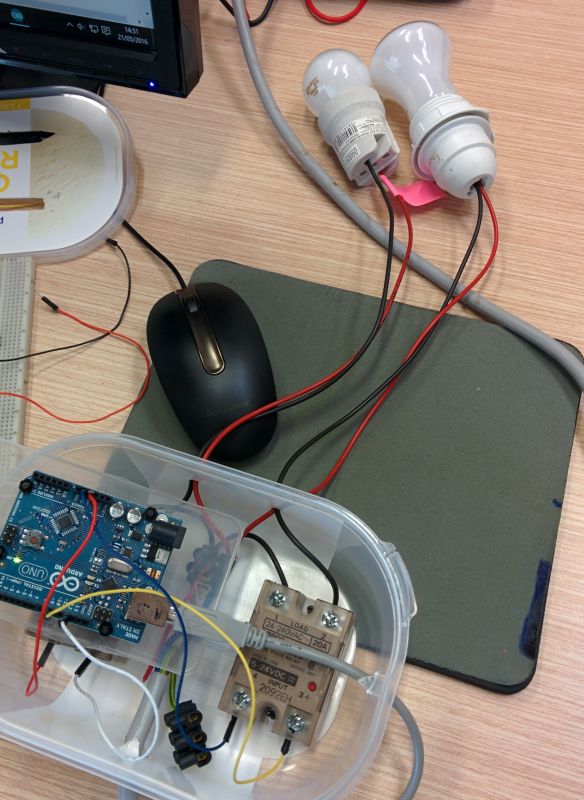
Prototypes
J’utilise deux relais « solid state » G3NA-220B (fiche technique ici, en pdf). Ils sont un peu surdimensionnés mais utiles en attendant la réception d’autres relais.
prototype n°1 : 2 lampes par liaison série
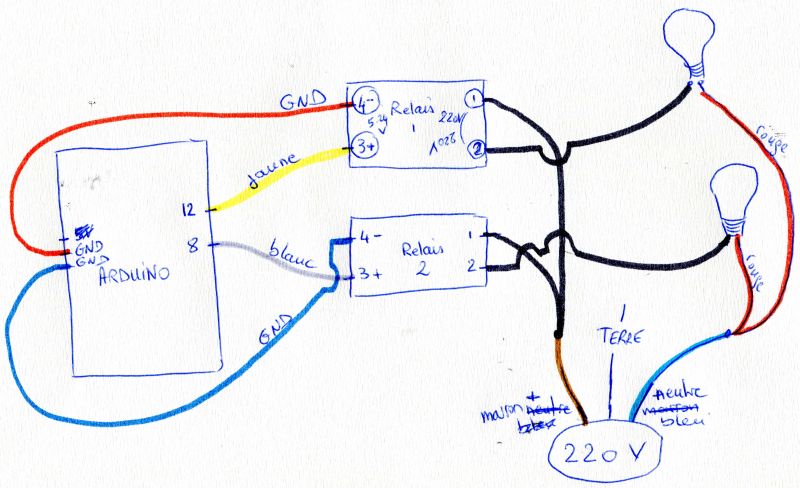
Je n’ai pas respecté les codes couleur… A revoir pour la version définitive !
Ce sketch (test-fanch-serie.ino) allume la lampe « Montée » lorsque je tape 0 dans la console série. SI je tape 1, c’est la lampe descente qui s’allume.
Ajout d’un module bluetooth
Paramétrage du module (HC-06) selon les modalités décrites dans cet article. Attention n°1 le sketch doit être changé pour que BTSerie.begin(9600); et non 57600 baud puisqu’un module neuf est paramétré par défaut à 9600 bauds.
Pour une raison que j’ignore, le sketch ne répondait à aucune autre instruction que AT (il répondait OK. J’ai donc modifié le sketch pour envoyer les instructions au HC-06 directement dans le setup…
J’ai donc modifié le sketch pour que le setup fasse les réglages suivants en direct, sans que j’ai à saisir des choses dans la console série.
- Demande le N° de version
- donne le nom store au module HC-06
- donne la vitesse 57600 baud au HC-06
BTSerie.print("AT+VERSION");
delay(1000);
BTSerie.print("AT+NAMEstore");
delay(1000);
BTSerie.print("AT+BAUD7");
delay(1000);
La console série affiche alors OKlinvorV1.8OKsetnameOK57600, donc les instructions ont été prises en compte.
Le sketch correspondant est celui-ci : BlueTooth-AT-commands-2016-05-22.ino
J’éteinds l’arduino. Je le redémarre. Le module ne communique maintenant plus qu’à 57600 baud avec l’arduino.
Proto n°2 : Interaction avec une appli Android
J’ajoute d’abord le module bluetooth HC-06 paramétré précédemment.
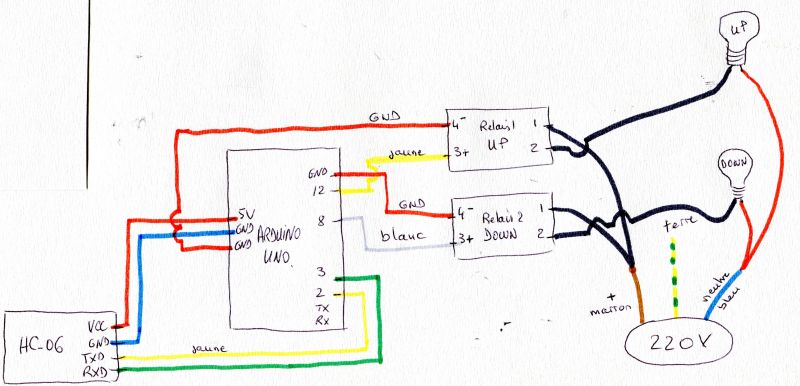
Commande de deux lampes par arduino Uno en bluetooth (HC-06)
Je vais utiliser l’application android JoystickBluetooth Commander (que j’utilise déjà dans le NoRobo – cf cet article).
I faut que :
- appui sur bouton 1 = montée pendant 3 secondes
- appui sur bouton 2 = descente pendant 3 secondes
- un deuxième appui sur l’un des deux boutons annule l’ordre
- si bouton 1 allumé, on ne peut pas simultanément descendre
- si bouton 2 allumé, on ne peut pas simultanément monter
en pseudocode, ça veut dire ce qui suit :
bool up = false;
bool down = false;
Si up est true ou down est true (il faut bouger le store)
si up est true ET down est true
on a un big problème, le moteur va devenir fou
sinon
allumer ou éteindre selon la valeur de up ou de down
Le sketch (test-fanch-BT-1.ino) permet de réaliser ça avec l’application Joystick Bluetooth commander connectée au module bluetooth « store » réglé à une vitesse de 57600 bauds.
Et voilà le résultat :
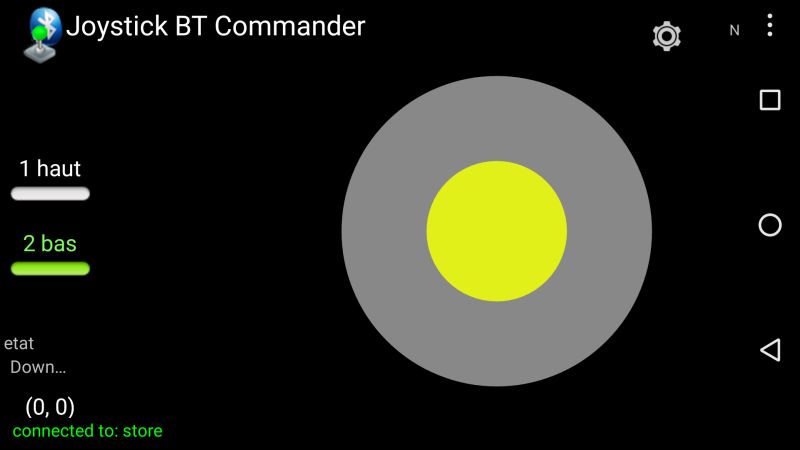
l’écran du smartphone android
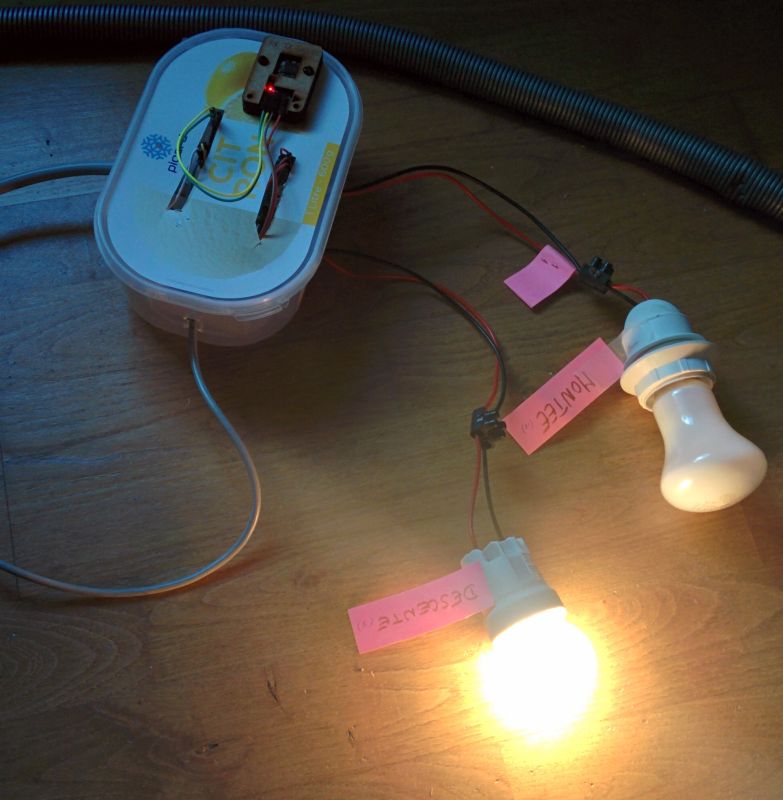
Le résultat : la lampe « descente » est allumée
Ca fonctionne correctement car il est effectivement impossible d’allumer les deux lampes à la fois (ce qui casserait le moteur).
Maintenant, il n’y a plus qu’à tester in situ !

par Anne-Laure DELPECH | 8 Mai 2016 | arduino
Quelqu’un m’a prêté un afficheur 7 segments qu’il n’avait jamais eu l’occasion d’essayer. Il s’agit d’un module « CSG-4S » comme celui ci, sur Lextronic.fr.
Comme trop souvent, il a été impossible de trouver de la documentation précise pour ce module. Le fabricant, Comfile ne documente que l’utilisation avec des PicBasic, des microcontrôleurs.
J’ai été mise sur la voie par un forum arduino, dans lequel quelqu’un annonçait avoir décollé l’étiquette sur son afficheur. J’ai décollé l’énorme étiquette « contrôle qualité » qui masquait le microprocesseur figurant sur le module. Et banco ! C’est un microprocesseur SAA1064, et on trouve plein d’informations sur son utilisation avec un arduino, et en particulier ce tutoriel de 2011, sur tronixstuff.com.
Le module afficheur 7 segments CSG-4S
Il y a une fiche technique pour ce module, qui date de 1991. J’y ai trouvé les informations suivantes :
- tension d’alimentation : 5V
- Les broches SDA et SCL sont compatibles I2C
- SDA et SCL peuvent recevoir 5V en entrée (ce n’est pas toujours le cas sur les afficheurs 7 segments)
La connexion avec l’arduino Uno
SDA et SDL permettent la connexion selon le protocole I2C. Je les ai donc (?) connecté respectivement à A5 et A4 de l’arduino.

La programmation de l’afficheur
J’ai tout simplement essayé deux des sketchs présentés sur le tutoriel de Tronixstuff :
Ci-dessous des photos de l’afficheur avec le deuxième sketch.



Et maintenant ?
Je vais rendre cet afficheur. Mais je vais essayer d’en utiliser un pour le NoRobo.

par Anne-Laure DELPECH | 8 Mai 2016 | arduino
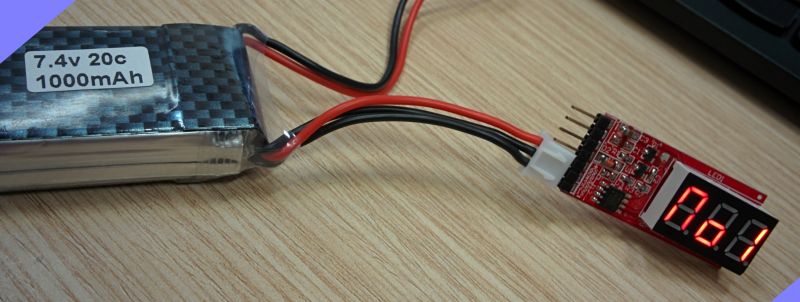
J’ai acheté un indicateur de tension pour batterie Lipo 2S à 6S, avec affichage et alarme. J’ai commandé ce composant sur Amazon, boutique Universal Color, pour 3.04 €. Mon but ici est de regarder comment il fonctionne, de l’essayer dans divers cas afin de décider ensuite quand et comment l’utiliser.
Le composant
 Le composant est livré sans notice, et les informations lors de la commande étaient minimes. Je savais simplement qu’il s’utilise pour des batteries Li-Po 2S-6S (7.4V ~ 11.1V).
Le composant est livré sans notice, et les informations lors de la commande étaient minimes. Je savais simplement qu’il s’utilise pour des batteries Li-Po 2S-6S (7.4V ~ 11.1V).
J’ai dû aller regarder plein d’images sur internet avant de comprendre le principe d’utilisation.
Utilisation avec une batterie Lipo
Comment faire la connexion ?
On connecte toujours le fil noir (le – de la batterie) sur la borne – du testeur. Le fil rouge (le +) est donc « au dessus » lorsqu’on regarde l’affichage dans le bon sens, avec les « . » vers le bas.
On utilise le connecteur JST-XH qui sert en principe pour l’équilibrage (la charge par exemple), pas le deuxième connecteur (prise BEC/JST, caché en dessous dans la photo) qui ne sert que pour alimenter un circuit.

Connexion d’une batterie 2S (7.4V)
Une fois connecté, l’afficheur indique brièvement combien de cellules contient la batterie qui y est connectée. Puis il affiche en alternance les informations suivantes : n°1 / 4.16 / n°2 / 4.16 / ALL / 8.33, comme sur les photos ci-dessous.

Noter qu’avec un voltmètre, la tension mesurée aux bornes de la batterie (connecteur BEC/JST) est de 7.85V…

Connexion d’une batterie 3S (11.1V)


Je n’ai pas vérifié la tension de cette batterie 3S avec un voltmètre.
Connexion de piles rechargeables
Le module ne fonctionne pas si je branche le – de 6 piles AA (en principe 9V) au – du module et le + à la première broche du module. Il mesure alors 0 volts (photo ci-dessous).

Il faut que je branche le + des 6 piles à la deuxième broche du module, comme s’il s’agissait d’une batterie 2S. Le module affiche alors n°1, n°2, ALL et la tension totale, 8.16 V :

Conclusion
Un moyen satisfaisant d’afficher la tension d’une batterie Lipo ou de piles rechargeables.
Je n’ai pas pu tester l’alarme.
Sur un robot qui reste sous les yeux de l’utilisateur, c’est une bonne solution pour éviter d’abîmer la batterie. Mais il vaudrait sans doute mieux un système qui transmet l’information à l’arduino pour qu’il puisse couper le robot si la batterie est trop faible.
par Anne-Laure DELPECH | 8 Mai 2016 | arduino
J’ai acheté un abaisseur – régulateur de tension ajustable pour 1.35 € livraison comprise sur Amazon (boutique Universal Color). Dans cet article j’en fais un essai rapide, dans le but de savoir quand et comment l’utiliser. (suite…)
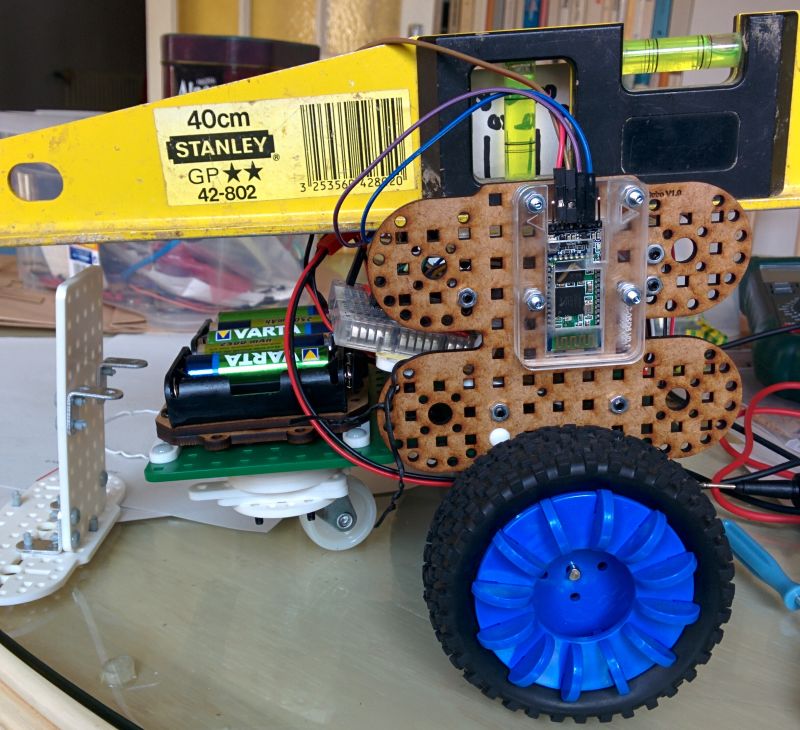
par Anne-Laure DELPECH | 28 Avr 2016 | arduino
Le titre de cet article était au départ « Le NoRobo balance [presque] ! ». Mais j’étais trop optimiste… Dans l’article précédent de cette série Un robot arduino, j’ai un sketch simple qui fait fonctionner le NoRobo sur trois roues et lit correctement son angle par rapport à la verticale. Il faut maintenant que le NoRobo balance ! (suite…)
par Anne-Laure DELPECH | 28 Avr 2016 | Cours en ligne
Dans l’article précédent, « Utiliser learndash et WordPress pour un cours en ligne ? », de cette série, [the series], j’ai étudié les possibilités de LearnDash. Dans ce deuxième article de la série ([the series]), je vais créer un premier cours en ligne de test. Mon but est simplement de voir ce que je peux faire, d’identifier des fonctionnalités non présentes et de commencer à définir quelles règles doit suivre le formateur pour créer un vrai cours.
Le cahier des charges de ce cours de test
- créer des cours, avec modules et séquences ;
- tester les différents modèles de quiz ;
- tester la remise de devoirs mis en ligne ;
- Délivrer un certificat à la fin du test ;
- l’accès aux cours est ouvert
- utiliser plusieurs formats de médias ;
Ce que je ne fais pas ici :
- je verrai plus tard pour les inscriptions ou le paiement en ligne ;
- pas de gestion du séquençage.
- pas de travail pour faciliter l’expérience utilisateur.
- pas d’utilisation de fonctionnalités plus sophistiquées, telles que les forums, les badges, le learndash toolkit, …
Ce que je veux obtenir avec ce test
- commencer à préparer une liste des fonctionnalités complémentaires à ajouter.
- identifier des problèmes potentiels
- commencer à préparer un tutoriel pour le formateur (le chapitre qui suit)
Le cours de test
J’ai créé ce cours sur un site de test. Je n’en donne pas le lien car je ne sais pas combien de temps je vais le laisser.
Je précise aussi que le site de test est sous WordPress 4.5, avec un thème maison. LearnDash fonctionne avec la plupart des thèmes. En cas de problème, l’idéal serait de mettre le thème WordPress twentyfifteen ou twentysixteen. J’ai désactivé toutes les autres extensions pour éviter des problèmes à ce stade.
étape 0 – installation et réglages de learndash
Voir « first steps » dans la documentation LearnDash : régler la licence et paypal comme indiqué.
A faire également : régler les noms que l’on va utiliser.
Aller dans leardash / paramètres puis l’onglet « custom labels ». Mettre les noms que l’on souhaite puis cliquer sur le bouton « update options ».

Ajuster le contenu de la barre latérale pour les cours
Ajouter les 4 widgets spécifiques dans la barre latérale primaire :
Etape 1 : créer un cours
Voir l’article « best practices » du support LearnDash. Je l’ai suivi tel quel pour créer la structure suivante :
Cours « learn 1 »
- module 1 « module uno »
- séquence 1 « démarrer »
- séquence 2 « poursuivre »
- module 2 « module dos »
- séquence 1 « commencer »
- séquence 2 « continuer ».
Dans un premier temps, je n’ai pas fait de quiz ni fait de réglages particuliers, j’ai juste suivi l’article ci-dessus (sauf que j’ai entré le titre de l’élément dans son contenu également).
Une fois le cours créé et publié,mais avant que des modules ne soient créés, si je suis le lien vers le cours (http://monsite//cours/learn-1/), voici ce que je vois :
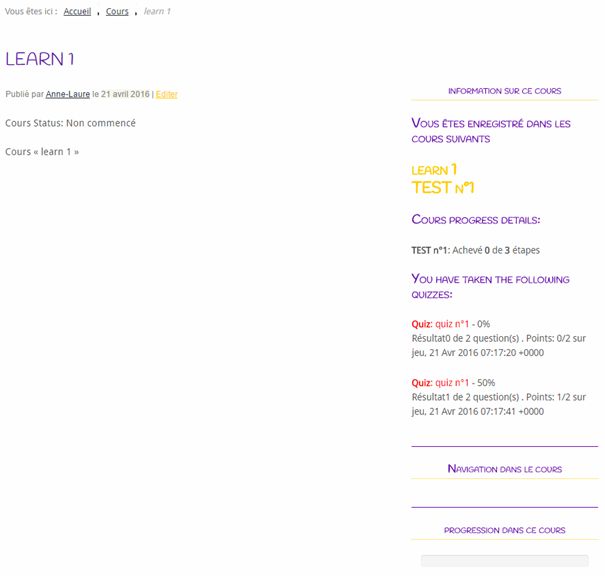
vue lorsque je suis utilisateur enregistré.
Dans cette copie d’écran, le widget « cours information » me donne des éléments puisque je suis enregistrée. Il me dit dans quels cours je suis inscrites et où j’en suis.
Si je consulte cette même page en n’étant pas enregistrée sur le site :
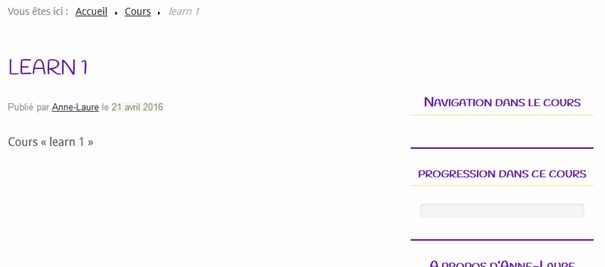
Vue lorsque je suis utilisateur non enregistré
Les réglages importants pour le cours sont :
- Cours price type : open= tout le monde le voit sans même s’enregistrer, tandis que gratuit = il faut s’enregistrer mais c’est gratuit. Si « open », les shortcodes [[visitor]] et [[student]] ne servent à rien. Si « gratuit », le texte entre [[visitor]] et [[/visitor]] n’est visible que des personnes non inscrites et celui qui est entre [[student]] et [[/student]] n’est visible que des personnes inscrites au cours.
- bien penser à faire un résumé, en utilisant le bouton « insérer la balise lire la suite » car il n’y a pas de champ « extrait ».
Noter aussi que l’ensemble des cours créés est visible sur la page http://monSite/cours/ et chaque cours a une page http://monSite/cours/LeCours.
Etape 2 : créer les modules et les séquences
J’ai également suivi les « best practices » du support LearnDash.
Maintenant si je vais (sans être enregistrée) sur la page du cours (http://monsite//cours/learn-1/), je vois ça :

Vue lorsque je suis utilisateur non enregistré
Si on clique sur « expand all », on voit aussi la subdivision en séquences.
Etape 3 : Ajouter des évaluations
Pour ajouter un quiz à la fin d’un élément du cours, je vais dans Learndash LMS/quiz et j’ajoute un quiz. Je lui donne un nom, je peux en faire une description avec l’éditeur classique puis je définis à quelle cours / module / séquence il est associé :
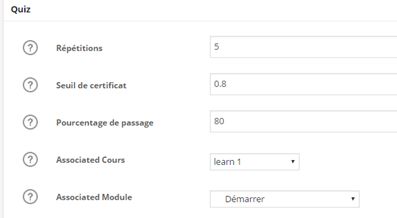
Réglages quiz
C’est en remplissant l’onglet questions que l’on définit quelles sont les questions auxquelles on souhaite une réponse. C’est dans l’onglet QUESTION aussi qu’on définit le type de quiz pour cette question.
Voir http://support.learndash.com/articles/creating-a-quiz/ pour tout ce qui concerne la création d’un quiz.
Dès qu’un quiz est associé à une séquence, il devient visible automatiquement en bas de la page de cette séquence.
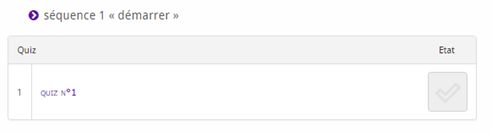
Le quiz est accessible en ligne
Etape 4 : tester les devoirs en ligne
Si on veut que l’apprenant upload un fichier avec sa réalisation, on ne peut le faire qu’en lien avec un module, pas une séquence :
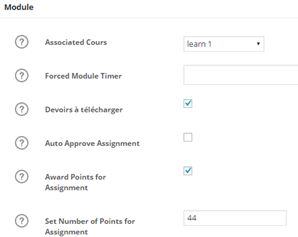
gérer les devoirs en ligne
Lorque c’est fait, l’apprenant voit alors les éléments suivants :

upload d’un devoir pour l’utilisateur
Etape 5 : Délivrer un certificat à la fin du cours ;
Les certificats associés sont définis dans les paramètres du quiz

association d’un certificat à un quiz
dans learndash LMS certificats, on paramètre ce certificat. C’est la photo choisie comme featured image qui sert de présentation du certificat. On voit le texte du certificat seulement car je l’ai mis en couleur très pale.
un certificat, très moche
Il faut ajouter du CSS en mode texte de l’éditeur pour ajuster les paramètres du certificat… Voir la vidéo https://www.youtube.com/watch?v=6wtz2zj7uzY
Etape 6 : tester l’ajout de médias
RAS, c’est comme dans n’importe quel article WordPress
Les difficultés identifiées
- La traduction en français n’est pas complète, ni côté back office, ni surtout côté apprenant.
- il n’y a pas de progression dans le cours, sans doute car rien ne permet de valider chaque étape.
Et maintenant
Il faut que je vérifies le plus rapidement possible que LearnDash correspond vraiment à mes besoins, et surtout à ceux des utilisateurs. Ce sera l’objet du troisième article de cette série cours en ligne avec learndash
par Anne-Laure DELPECH | 24 Avr 2016 | arduino
Dans l’article précédent de cette série Un robot arduino, j’ai enfin réussi à calculer l’angle définissant la verticalité du NoRobo. Cet angle est stable et paraît juste. Mais le code est monstrueusement long (plus de 1500 lignes) et il est très difficile de s’y retrouver. En cherchant à comprendre la régulation PID – qui sera indispensable pour le NoRobo balance enfin – je suis tombée sur du code beaucoup plus simple. J’ai donc décidé de travailler tout de suite à la simplification du code. (suite…)

par Anne-Laure DELPECH | 21 Avr 2016 | Cours en ligne
Je veux créer des cours en ligne pour mes clients ou prospects. J’ai acheté l’extension learndash voici quelques temps. J’ai fait quelques essais mais je n’ai pas poursuivi. Aujourd’hui je recommence. Je vais documenter ce travail dans une série d’article ([the series]) qui contiendra les éléments suivants :
- quelles sont les possibilités de learndash
- installer learndash et créer un premier cours de test.
- Etudier les différents paramètres et définir à quoi ils servent
- Voir les possibilités de quiz et remise de devoirs en ligne
- d’autres choses, en fonction de ce que je découvre.
Dans ce premier article, je vais voir quelles sont les possibilités de learndash.
Que peut-on mettre dans un cours en ligne ?
Pour en savoir plus sur WordPress et la formation en ligne, voir l’article ci-dessous. On peut aussi regarder les vidéos en français de cette page.
WordPress e-learning : une révolution pour la formation en ligne ?
Un cours en ligne est un ensemble de modules (pouvant être subdivisés en séquences) qui comprend des contenus pédagogiques et des évaluations. Au fur et à mesure de l’avancement de l’apprenant, il peut obtenir des certificats qui valident des apprentissages.
L’accès au cours peut être totalement ouvert ou réservé à certains. Lorsqu’il est réservé à certains, l’accès peut être gratuit ou payant.
Enfin, comme dans une formation en présentiel, il peut être nécessaire d’imposer une séquence précise ou un délai entre deux séquences.
Le créateur d’un cours en ligne doit donc au minimum pouvoir réaliser les actions suivantes :
- créer des cours, avec modules et séquences ;
- évaluer l’apprenant par le biais de quiz en ligne ou par des devoirs mis en ligne ;
- Délivrer des certificats ;
- gérer les accès aux cours, par inscription et/ou paiement en ligne ;
- gérer le séquençage : imposer qu’une séquence soit finie avant d’en démarrer une autre ou imposer un délai pour l’accès au module suivant.
Le cours en ligne et l’expérience apprenant
 Pour l’apprenant, qui peut ne pas être très à l’aise avec l’informatique, il est essentiel que le cours en ligne lui offre une expérience agréable et motivante.
Pour l’apprenant, qui peut ne pas être très à l’aise avec l’informatique, il est essentiel que le cours en ligne lui offre une expérience agréable et motivante.
- simplifier l’utilisation ;
- proposer plusieurs médias. Par exemple si un cours est présenté sous forme vidéo, proposer une transcription écrite et l’éventuel diaporama en pdf séparé ;
- rendre la formation ludique (gamification) ;
- les évaluations ne devraient pas servir (seulement) à évaluer. Elles peuvent être très utiles à l’apprenant pour mieux comprendre, pour se positionner en tant qu’acteur de sa formation. Elles peuvent aussi servir au formateur pour identifier des points faibles de sa formation.
- faciliter les échanges avec des humains : avec le formateur, éventuellement avec d’autres apprenants ;
- s’adapter aux différentes façons d’apprendre
Quelles sont les fonctionnalités de learndash
Learndash est l’un des nombreux plugin LMS (Learning Management System) pour WordPress. Je l’ai choisi car c’est la seule extension créée par des spécialistes du elearning et pas par des spécialistes de WordPress. Learndash s’interface pourtant très bien avec WordPress.
compatible mobiles / tablettes
Les apprenants doivent pouvoir utiliser l’équipement de leur choix pour accéder aux cours.
vente en ligne possible
learndash s’interface avec différentes solutions de vente en ligne : Paypal ou autres avec des extensions complémentaires (gratuites ou pas).
L’achat peut se faire soit en une fois, soit par abonnement.
L’accès au cours peut être supprimé au bout d’un certain temps.
contenus fournis en « goutte à goutte »
Les contenus peuvent être mis à disposition par « drip feed » : à une date définie, x jours après l’inscription ou uniquement si un autre contenu a été validé auparavant.
gestion des « devoirs »
Lorsque l’apprenant doit rendre un « devoir », le formateur est informé de sa mise à disposition et peut le valider ou non, faire des commentaires.
Des évaluations sophistiquées
On peut utiliser des questions à choix unique ou multiple, demander une réponse en texte libre, proposer de trier des réponses ou de les mettre dans la bonne case. On peut aussi faire une enquête.
Voir toutes les options ici (en anglais).
forums
l’apprenant peut s’inscrire à des forums spécifiques au cours. Voir l’article en anglais de learndash à ce sujet.
notifications par mail
Le formateur et l’apprenant peuvent recevoir des mails liés au cours.
rapports par utilisateur
On peut suivre chaque utilisateur : où en est-il dans le cours ? Quels sont ses résultats ?
Gestion de groupes
On peut créer des groupes d’apprenants. Par exemple un groupe de salariés d’une entreprise peut être créé pour un suivi spécifique.
Gestion de badges
Avec des extensions (gratuites), on peut générer des badges qui signifient qu’on a réussi une étape. Ca ajoute un côté ludique, utile si bien fait.
clonage des cours
Pour que le formateur puisse cloner des cours sur un autre site. C’est une extension gratuite. Voir ici.
Autres fonctionnalités
L’extension « LearnDash Toolkit » a été créée par une entreprise d’e-learning canadienne. Après avoir utilisé ces éléments pour leurs propres créations, ils l’ont mis à disposition gratuitement.
Et maintenant
Je vais créer mon premier cours en ligne dans l’article suivant de cette série cours en ligne avec learndash.

par Anne-Laure DELPECH | 16 Avr 2016 | astuces rapides, CAO
J’ai souvent besoin de convertir des dxf en svg pour les utiliser avec inkscape avant impression laser. Jusqu’à présent, c’était la galère. Mais je viens de trouver une solution. La voici. (suite…)

par Anne-Laure DELPECH | 15 Avr 2016 | arduino
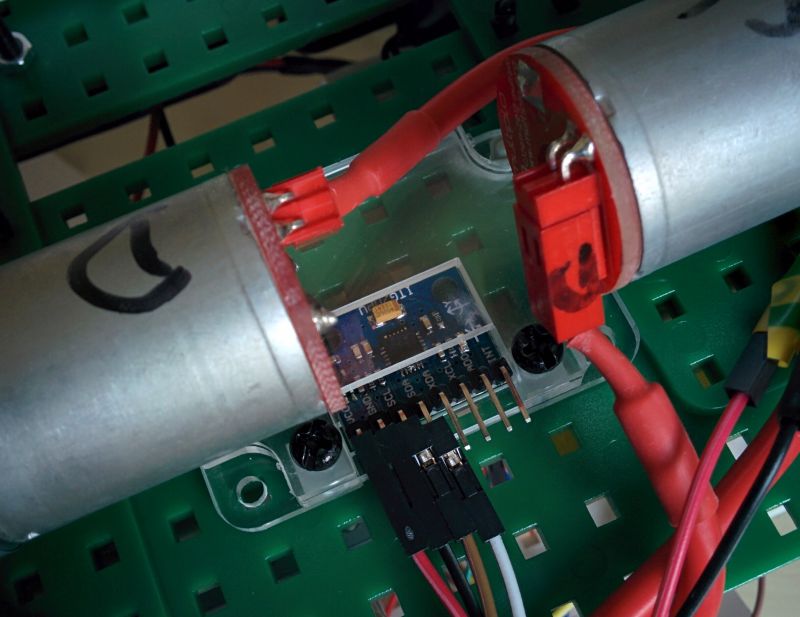
Ceci est le sixième article de la série Un robot arduino. J’avance en compréhension mais pas en résultats depuis le deuxième article…
Je poursuis ici les tentatives de faire fonctionner correctement le filtre complémentaire sur le gyroscope MPU6050. Ca va balancer ! (suite…)
Commentaires récents