par Anne-Laure DELPECH | 22 Juin 2016 | Cours en ligne
Je décris ici les premiers pas pour un formateur qui voudrait créer son cours en ligne. Dans les deux premiers articles de cette série cours en ligne avec learndash, j’ai validé que LearnDash est adapté pour ce que je veux faire (heureusement puisque j’ai déjà acheté cette extension…). Maintenant je me concentre sur l’utilisation par le formateur. Dans d’autres articles, je retournerai côté web designer pour faire les ajustements nécessaires (styles au moins).
Je précise que LearnDash est une extension payante. Je l’ai achetée voici au moins deux ans, à une époque où l’on payait une fois et on disposait de l’utilisation à vie. Ma licence expire « December 8, 2114 ». C’est même plus qu’à vie !
Installer l’extension LearnDash pour WordPress
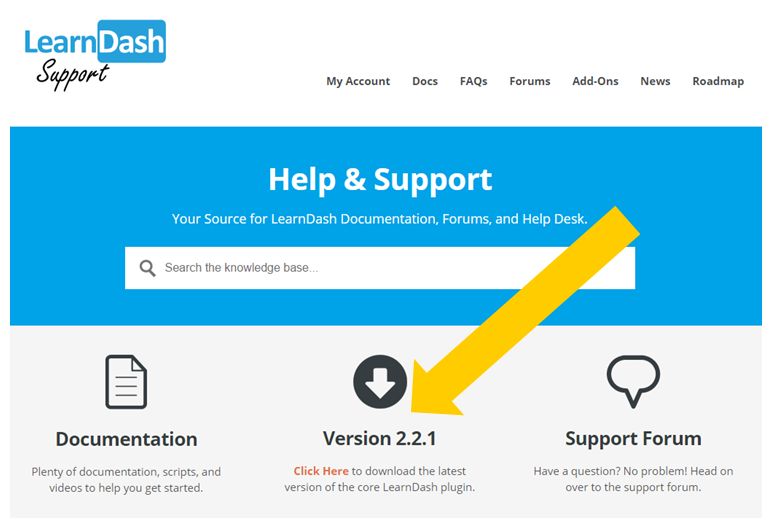
J’ai une licence, j’ai donc un accès au site de support technique. Je peux y télécharger la dernière version de LearnDash (indiqué par la flèche orange dans la copie d’écran ci-dessous).
Dans le site cible, choisir ajouter une extension puis choisir « mettre en ligne une extension au format .zip » (flèche orange ci-dessous) :

Choisir le fichier zip puis installer. Activer l’extension.
Faire quelques réglages
Si learndash n’a jamais été installé, il faut aller dans Réglages (settings) et entrer le numéro de licence et l’adresse mail associée.
Dans réglages, choisir l’onglet « custom labels » et donner un nom
| label |
Mon texte |
| Course |
Cours |
| Courses |
Cours |
| Lesson |
Module |
| Lessons |
Modules |
| Topic |
Séquence |
| Topics |
Séquences |
| Quiz |
Quiz |
| Quizzes |
Quiz |
| Take this Course (Button) |
Suivez ce cours |
| Mark Complete (Button) |
J’ai fini |
| Click Here to Continue (Button) |
Cliquez ici pour continuer |
Maintenant mes cours contiennent des modules, eux-mêmes subdivisés en séquences.
Créer un nouveau cours
Dans le tableau de bord WordPress, cliquer sur « add new » cours.
On donne un titre et un contenu comme avec un article WordPress classique. Voici les spécificités :
Choix du type de cours
- Ouvert : le cours est gratuit et en plus il est ouvert à tous, sans inscription préalable.
- Fermé : personne ne peut s’inscrire à ce cours.
- Gratuit : le cours est gratuit mais il n’est accessible qu’aux personnes qui s’y sont inscrites.
- Achat unique : l’accès au cours se paie en une fois.
- Récurrent : l’accès au cours se paie en plusieurs fois.
Pour un premier essai de cours gratuit en ligne accessible aux personnes qui se sont inscrites, je choisis « gratuit ».
Le résumé du cours
Il n’y a pas de champs « extrait » pour les cours. Mais on peut placer du contenu entre [[visitor]] et [[/visitor]] pour qu’il soit visible de tous. On peut ainsi mettre un texte de vente à destination des visiteurs, avec une vidéo par exemple. Si le visiteur s’inscrit, il verra le reste du contenu.
Si on veut un texte spécifique aux personnes inscrites, on le met entre [[student]] et [[/student]].
Où voir la liste des cours
Dans n’importe quelle page, on peut insérer un shortcode [[ld_course_list]] qui affichera la liste des cours.
Ajouter des modules
Dans le support LearnDash, ce sont des « lessons ».
Dans l’onglet « module options » définir dans quel ordre seront présentées les leçons : par date de création, par titre (ordre alphabétique) ou par ordre de menu. Dans ce dernier cas, l’ordre est défini dans le champs « attributs » / « ordre » dans la colonne de droite à côté d’un module en cours d’édition. On met 1 à la première leçon, etc…
Les réglages des modules
- Cours associé : le cours dans lequel s’inscrit ce module
- Sample module : si la case est cochée, ce module est visible de tous, comme un « échantillon » pour des gens qui voudraient essayer avant d’acheter.
- Make module visible X days after sign-up : utile si l’on veut imposer un délai entre deux modules.
- Make module visible on specific date : intéressant pour des formations mélant du présentiel et de la formation à distance.
Ajouter des séquences
On n’est pas obligé de créer des séquences. C’est cependant une bonne idée pour que l’apprenant ait l’impression d’avancer et pour bien structurer chaque module en « capsule » facile à intégrer dans son planning et dans son cerveau.
Créer des quiz
On peut créer des quiz pour des modules ou des séquences. En principe tant que l’apprenant n’a pas atteint le niveau minimum requis il ne peut pas passer à l’étape suivante.
Liens utiles (en anglais…)
Sur les shortcodes de LearnDash : http://support.learndash.com/articles/course-shortcodes/
Note : La traduction en français doit être revue…

par Anne-Laure DELPECH | 19 Juin 2016 | Raspberry Pi
Je veux qu’un Raspberry Pi lise et serve un flux vidéo issu d’une caméra IP (en wifi ou ethernet). J’ai choisi d’installer motion car il me permettra de détecter les mouvements puis de déclencher des alertes. Dans cet article, j’explique seulement comment installer motion puis visualiser le flux vidéo sur une page web, en streaming.
Ce qu’il faut
- un Raspberry Pi (un B+, avec une carte sd qui contient tout ce qui a été créé dans l’article Mise en service d’un Raspberry Pi – ie pour moi avec l’image radio-pi-2016-06-10-8h.img et Raspbian Jessie)
- une caméra web, pour moi connectée par cable ethernet, une Foscam FI8905W, avec une IP fixe).
Changer le nom du Pi et vérifier
regarder l’adresse IP du pi sur le routeur local (pour moi 192.168.1.16)
se connecter au pi en ssh et changer son nom (hostname)
ssh root@192.168.1.16
raspi-config
puis dans 9- advanced options, aller dans A2 hostname et renommer le Pi (pour moi, « nautilus »). Finir et accepter le Reboot
Maintenant je peux me connecter à ce pi avec ssh root@nautilus .
Noter que je me connecte en root, ce qui n’est pas conseillé. Mais ça m’évite de taper « sudo » devant chaque commande !
Installer motion
on installe des utilitaires nécessaires puis motion.
apt-get install -y libjpeg62-turbo libjpeg62-turbo-dev libavformat-dev libavcodec-dev libavutil-dev libc6-dev zlib1g-dev libmysqlclient18 libmysqlclient-dev libpq5
apt-get install motion
apt-get update
apt-get upgrade
Ca prend pas mal de temps (plusieurs minutes).
Pendant ce temps, préparer la page html qui servira à débugger et vérifier.
Préparer une page html de débogage et vérification
Créer un fichier page-test.html sur un PC, qui contient le code suivant :
<!DOCTYPE html>
<html lang="fr">
<head>
<meta charset="utf-8">
<title>premier test d'affichage caméra</title>
<link href="A-style.css" rel="stylesheet" media="all" type="text/css">
</head>
<body>
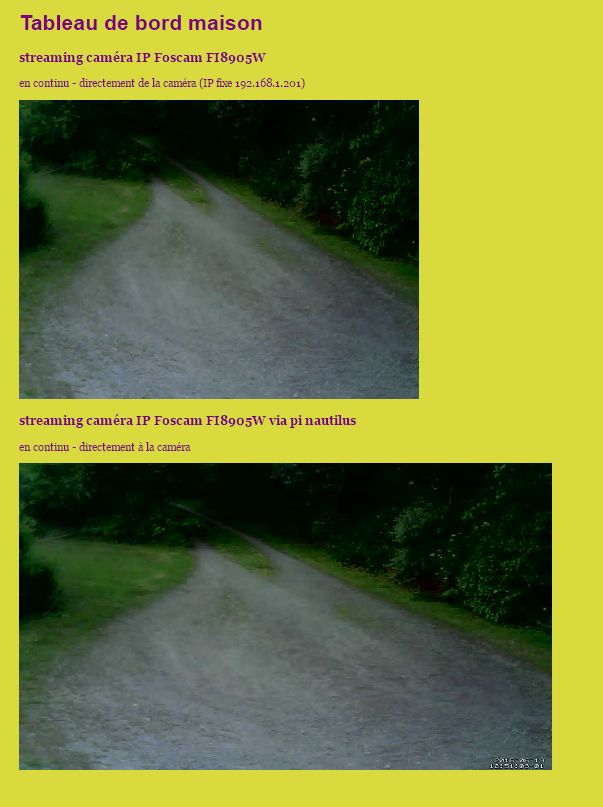
<H1>Tableau de bord maison</h1>
<section class="streaming">
<h3>streaming caméra IP Foscam FI8905W</h3>
<p>en continu - directement de la caméra (IP fixe 192.168.1.201)</p>
<img name="FoscamCamera" src="https://USER:PWD@192.168.1.201:80/videostream.cgi?user=USER&pwd=PWD" width="600" height="450" alt="Live Feed" style="background-color: #009999" />
</section>
<section class="streaming">
<h3>streaming caméra IP Foscam FI8905W via pi nautilus</h3>
<p>en continu - directement à la caméra</p>
<img src= "http://nautilus:8081/?action=stream" width="640" height="480" title="Camera devant maison"/>
</section>
</body>
</html>
Evidemment, il faut remplacer USER et PWD par les bons codes de la caméra utilisée.
Dans le même répertoire, placer un fichier A-style.css
html, body {
background-color: #d8da3d ;
margin: 0;
padding: 0;
}
body {
padding-left: 11em;
font-family: Georgia, "Times New Roman",
Times, serif;
color: purple;
background-color: #d8da3d
}
h1 {
font-family: Helvetica, Geneva, Arial,
SunSans-Regular, sans-serif }
a:link {
color: blue
}
a:visited {
color: purple
}
Et maintenant, dans l’explorateur de fichiers, cliquer à droite sur page-test.html et choisir ouvrir avec votre navigateur favori (chrome pour moi).
On voit le flux vidéo de la caméra en direct mais évidemment pas celui qui passe par le pi puisqu’on n’a pas encore fini d’installer et de configurer motion.
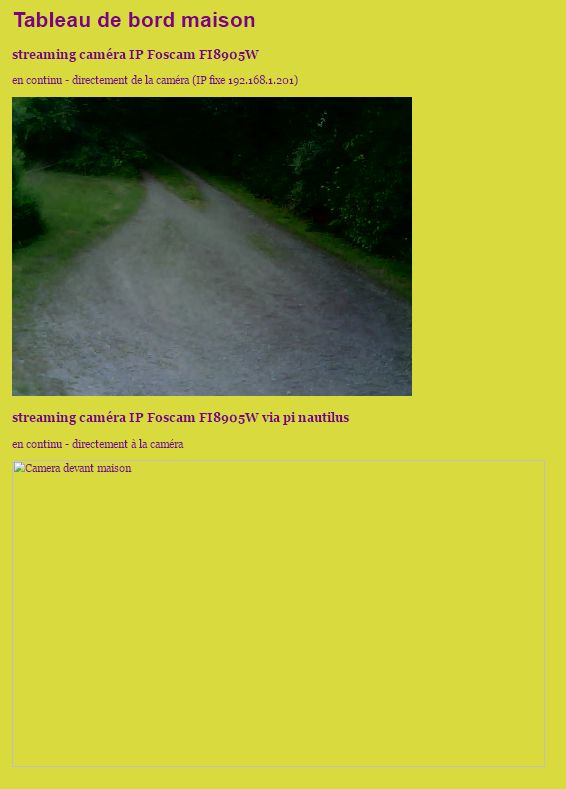
page web de test et deboguage de motion sur Raspberry Pi
Evidemment, si la première partie de la page n’affiche pas le flux vidéo de la caméra, chercher comment régler la caméra. Pour moi ça fonctionne avec une caméra Foscam FI8905W réglée comme suit :
- adresse IP fixe 192.168.1.201
- un administrateur (il faudrait sans doute que ce soit seulement un visiteur pour limiter les risques) nommé USER avec mot de passe PWD
- firmware version 11.35.2.63
- Device Embeded Web UI Version 2.4.20.11
Il est impératif de vérifier que http://USER:PWD@192.168.1.201:80/videostream.cgi?user=USER&pwd=PWD permet bien la visualisation du flux vidéo provenant de la caméra. Sinon la configuration de motion ne fonctionnera pas !
installer motion comme un « service »
Redémarrer le pi avec init 6 ou reboot .
On veut que motion démarre en même temps que le Pi . Pour cela motion doit être installé comme un service.
Dans /etc/default/motion (attention si vous n’utilisez pas Raspbian Jessie, je crois que c’est un autre répertoire), modifier la ligne suivante (no devient yes) :
start_motion_daemon=yes
Pour donner les bons droits d’accès aux fichiers et répertoires nécessaires à motion (les fichiers et répertoires sont ceux qui sont définis dans motion.conf) :
# /etc/motion/motion.conf et thread_.conf en 775 et propriétaire root/motion
chown -R root:motion /etc/motion/
chmod -R 775 /etc/motion/ #664 will not work when motion runs as a service
# /usr/bin/motion : 755
chmod 755 /usr/bin/motion
#var/run/motion (pour motion.pid)
mkdir /var/run/motion
touch /var/run/motion/motion.pid
chmod 755 /var/run/motion/motion.pid
#/home/al/motion/ en niveau 777 et propriétaire root / motion
# dans /home/al/motion/ créer le fichier motion.log en niveau 777
# thread0.conf (foscam) : /home/jf/motion/log/foscam
# thread1.conf (tablette) : /home/jf/motion/log/galaxy
mkdir /home/jf/motion
mkdir /home/jf/motion/log
mkdir /home/jf/motion/log/galaxy
mkdir /home/jf/motion/log/foscam
touch /home/jf/motion/log/motion-log.log
chown -R root:motion /home/jf/motion/
chmod -R 755 /home/jf/motion/
chmod 777 /home/jf/motion/log/motion-log.log
Redémarrer le pi avec init 6 ou reboot .
Maintenant, on doit voir motion parmi tous les services en cours de fonctionnement, avec un « + » devant :
service --status-all
Une liste de services s’affiche, en ordre alphabétique. Lorsqu’il y a [+] devant le service est démarré, sinon il y a [-] devant.
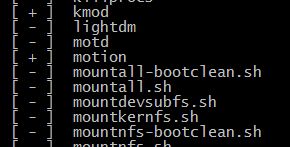
On voit dans cette copie d’écran que motion est démarré.
et si on veut voir le statut de motion
service motion status –l
Logiquement il y a des lignes en rouge, en particulier [ALR] [VID] vid_v4lx_start: Failed to open video device /dev/video0: . C’est normal puisqu’on n’a pas configuré motion.
Dans ce qui suit, on utilisera les commandes suivantes pour arrêter, démarrer ou redémarrer le service motion :
service motion stop
service motion start
service motion restart
Maintenant, il nous reste à configurer motion.
configurer motion
Nous voulons que motion lise le flux vidéo de la caméra à l’adresse IP 192.168.1.201 et qu’il autorise l’accès par un appareil sur le réseau.
Avant de modifier /etc/motion/motion.conf, en faire une copie qu’on appellera par exemple motion.conf.OLD. motion.conf doit avoir des droits d’accès en 664.
Editer motion.conf et régler les lignes comme suit, dans l’ordre du contenu du fichier (pour moi This config file was generated by motion 3.2.12+git20140228 , ça m’indique la version de motion pour lesquelles cette configuration fonctionne).
Pour mieux comprendre les options de réglages que l’on a, voir le wiki de l’auteur de motion, ici.
daemon on
logfile /home/jf/motion/log/motion-log.log
log_level 6 # on le laisse à ce niveau par défaut pour l'instant
v4l2_palette 8 # 17 ne marche pas correctement
width 640 #320 # lié à la caméra pour moi 640
height 480 # lié à la caméra
framerate 2 #2 image par seconde
# pour netcam_url, remarquer le ';' devant et le supprimer !
netcam_url http://USER:PWD@192.168.1.201:80/videostream.cgi?user=USER&pwd=PWD
; netcam_userpass value # laisser en commentaire avec ; devant
netcam_keepalive on
ffmpeg_output_movies on
; si on ne commente pas, erreur [0] [ALR] [ALL] conf_cmdparse: Unknown config option "sdl_threadnr"
; erreur pas grave mais remplit le fichier log
# sdl_threadnr 0
target_dir /home/jf/motion/log # Target base directory for pictures and films
# on utilise la commande http qui fonctionne en direct dans notre page web de déboguage
stream_port 8081
stream_localhost off # permet l'accès en local
webcontrol_port 8085
webcontrol_localhost off # on bloque l'accès
Ensuite on redémarre motion avec service motion restart . Puis Puis service motion status -l nous indique si tout va bien.
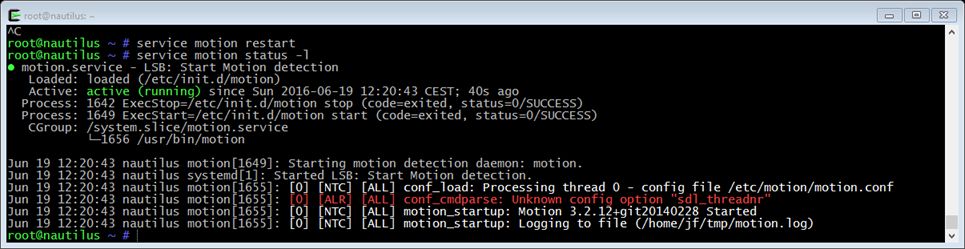
Tout va bien mais erreur Unknown config option « sdl_threadnr ». Je n’ai pas trouvé comment la résoudre et ça ne paraît pas géner le fonctionnement de motion.
Tester le bon fonctionnement
Si le flux de la caméra ne s’affiche pas correctement dans la deuxième partie de notre page de test page-test.html , ouvrir /home/al/tmp/motion.log et identifier l’erreur qui bloque motion.
on peut aussi arrêter le service motion (service motion stop ) et taper seulement motion , qui affiche des indications d’erreurs éventuelles.
Et maintenant ?
Dans l’article suivant de cette série Caméra de surveillance et Raspberry Pi, nous verrons comment configurer motion pour qu’il détecte les mouvements et alerte.

par Anne-Laure DELPECH | 16 Juin 2016 | Raspberry Pi
Je veux transformer mon Pi en serveur web qui mettra à ma disposition des informations issues de divers capteurs dans ma maison. La première étape (après l’installation du Pi décrite dans Mise en service d’un Raspberry Pi ) est d’installer Apache.
Installer Apache
Apache est un serveur de page web sous le protocope http. Pour l’installer, j’ai suivi les instructions ici sur le site officiel du raspberry Pi.
C’est rapide. Ensuite je tape http://nautilus/ (c’est le « hostname » de ce Pi) et je vois la page par défaut d’apache, servie par mon Pi localement.
installer PHP
Selon les mêmes instructions que pour l’installation d’Apache.
J’ai ensuite supprimé /var/www/html/index.html et je l’ai remplacé par /var/www/html/index.php , dans lequel j’avais ajouté le code suivant :
<!DOCTYPE html>
<html lang="fr">
<head>
<meta charset="utf-8">
<title>premier test d'affichage caméra</title>
<link href="A-style.css" rel="stylesheet" media="all" type="text/css">
</head>
<body>
<H1>test Raspberry Pi Web server</h1>
<p>Bonjour ! </p>
</body>
</html>
Et ça fonctionne !

par Anne-Laure DELPECH | 12 Juin 2016 | arduino
J’ai un clavier à 12 touches qui ressemble beaucoup à celui ci, sur amazon.fr. Je fais un essai pour voir si j’arrive à en lire les touches lorsque je le connecte à un arduino Uno.
Identification des broches
 le clavier présente 10 connecteurs mais il suffit de souder les 8 du milieu.
le clavier présente 10 connecteurs mais il suffit de souder les 8 du milieu.
Ensuite, avec un multimètre réglé sur 2KΩ, on regarde quels fils se connectent lorsqu’on appuie sur une touche.
Numéroter les broches de 1 à 8 : de droite à gauche lorsqu’on voit le clavier.
Le clavier est matriciel : chaque touche correspond à une colonne et une ligne que j’ai numéroté arbitrairement comme dans ce schéma :
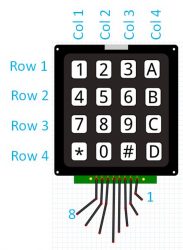
Pour savoir quelle broche est connectée à quelle colonne ou ligne, il faut déterminer quels sont les associations de broches qui entrent en contact lorsqu’on appuie sur une touche. Ainsi si j’appuie sur 1, en voyant quelles broches entrent en contact, je déterminerai que l’une des deux est « row 1 » et l’autre est « col 1 ».
J’ai déterminé que la broche 7 et la broche 4 sont connectées lorsque j’appuie sur la touche 2. J’ai continué jusqu’à ce que j’ai assez d’informations pour identifier le rôle de chaque broche.
| broche |
broche |
touche |
| 7 |
4 |
2 |
| 7 |
3 |
5 |
| 7 |
2 |
8 |
| 7 |
1 |
0 |
| 8 |
1 |
* |
| 6 |
1 |
# |
| 1 |
1 |
D |
J’en ai donc déduit que les broches correspondent à :
| broche |
broche |
| 1 |
Row 4 |
| 2 |
Row 3 |
| 3 |
Row 2 |
| 4 |
Row 1 |
| 5 |
Col 4 |
| 6 |
Col 3 |
| 7 |
Col 2 |
| 8 |
Col 1 |
Connexion à l’Arduino

| broche |
broche |
arduino |
| 1 |
Row 4 |
8 |
| 2 |
Row 3 |
9 |
| 3 |
Row 2 |
10 |
| 4 |
Row 1 |
11 |
| 5 |
Col 4 |
4 |
| 6 |
Col 3 |
5 |
| 7 |
Col 2 |
6 |
| 8 |
Col 1 |
7 |
Sketch
La bibliothèque keypad.h permet de gérer facilement un tel clavier matriciel. Voir cet article sur Arduino Playground.
Ce sketch lit correctement chaque touche appuyée et l’affiche dans la console série :
#include <Keypad.h>
const byte ROWS = 4; //four rows
const byte COLS = 4; //four columns
//define the cymbols on the buttons of the keypads
char keys[ROWS][COLS] = {
{'1', '2', '3', 'A'},
{'4', '5', '6', 'B'},
{'7', '8', '9', 'C'},
{'*', '0', '#', 'D'}
};
byte rowPins[ROWS] = {11, 10, 9, 8}; //rows 1 to 4
byte colPins[COLS] = {7, 6, 5, 4}; //columns 4 to 1
//initialize an instance of class NewKeypad
Keypad keypad = Keypad( makeKeymap(keys), rowPins, colPins, ROWS, COLS);
void setup(){
Serial.begin(9600);
Serial.println("Setup done");
}
Si j’appuie sur les touches 1, 2, 3, A, 4, 5, 6, B, 7, 8, 9, C, *, 0, # puis D, j’obtiens l’affichage suivant dans la console série.
Setup done
key : 1
key : 2
key : 3
key : A
key : 4
key : 5
key : 6
key : B
key : 7
key : 8
key : 9
key : C
key : *
key : 0
key : #
key : D
Tout fonctionne donc parfaitement.
Et maintenant ?
Si j’ai besoin d’utiliser un tel clavier sur un arduino, je sais maintenant comment faire !

par Anne-Laure DELPECH | 8 Juin 2016 | arduino
Un collègue du FabLab de Quimper m’a prêté deux afficheurs LCD jamais utilisés. Ils devraient en principe fonctionner avec un arduino. J’essaie donc !
Les trois afficheurs
Deux afficheurs prêtés :
L’un comporte les indications suivantes : CLCD sur le contrôleur et GDM1604B sur l’afficheur. Il ressemble à ce produit de Lextronic (35.15 €), avec une fiche technique (pdf) et un manuel utilisateur chez ComFile.
L’autre : ALCD sur le contrôleur et PMC 2004E-SBLW ou PC-2004E6-2 Rev 1 sur l’afficheur. Il paraît correspondre à cet afficheur 2 x 16 caractères de Lextronic (27.5 €).
Les deux produits semblent conçus par Comfile pour les microcontrôleurs PicBasic. Je ne parviens pas à trouver d’information intéressante sur la façon de les connecter à un arduino et surtout de les commander via les contrôleurs.
Je décide donc d’utiliser un des afficheurs sans son contrôleur pour voir ce que l’on peut en faire.
Afficheurs achetés
J’ai également acheté un jeu de 5 afficheurs LCD très économiques : Ecrans LCD 16×2 HD44780 Controleur Retro-eclairage Bleu, sur amazon.fr, à 7.24 € les 5 (oui, les 5…)
Description d’un afficheur LCD
J’ai déconnecté le contrôleur ALCD de l’afficheur PMC 2004E-SBLW. Je me retrouve avec un afficheur pourvu de 16 broches males, numérotées de 1 à 16.
La page « Arduino – Hello World » indique que de nombreux afficheurs LCD à 16 broches sont compatibles avec le driver Hitachi HD44780 (ce qui est annoncé pour l’afficheur acheté, pas pour les deux prêtés). Un autre article sur codingcolor.com montre en photo les connecteurs.
Et l’afficheur acheté séparément contient aussi 16 broches.
Connexion des 16 broches de l’afficheur LCD
Pendant un bout de temps, les trois afficheurs affichent des carrés foncés mais pas le texte prévu… J’ai fini par me rendre compte que j’avais connecté DB11 à DB14 de l’afficheur sur les broches 4 à 1 de l’arduino et non 5 à 2….
Note : on peut remplacer le potentiomètre par un fil entre GND et la broche 3 de l’afficheur avec une résistance de 1 à 1.5 kΩ. Avec mon afficheur j’ai mis une résistance de 1 KΩ et l’affichage est très bien.
Connexions à l’arduino
| afficheur |
fonction |
arduino |
| 1 |
VSS |
GND |
| 2 |
VDD |
5V |
| 3 |
contraste |
potentiomètre |
| 4 |
RS (register select) |
D12 |
| 5 |
R/W Read / Write |
GND |
| 6 |
H/L enable |
D11 |
| 7 |
DB0 (data 0) |
– |
| 8 |
DB1 (data 1) |
– |
| 9 |
DB2 (data 2) |
– |
| 10 |
DB3 (data 3) |
– |
| 11 |
DB4 (data 4) |
5 |
| 12 |
DB5 (data 5) |
4 |
| 13 |
DB6 (data 6) |
3 |
| 14 |
DB7 (data 7) |
2 |
| 15 |
LED + (5V) rétro-éclairage |
220 Ω puis 5V |
| 16 |
LED – (GND) |
Résistance 220 ohm |
schéma (frietzing)

Sketch arduino (issu d’un exemple) : test-lcd-display-yves.ino
Et le résultat, pour les 3 afficheurs, avec le même sketch. La seule chose qu’il faut régler c’est le contraste avec le potentiomètre.


Et on voit que les deux derniers afficheurs sont faits pour 4 lignes, il faudrait modifier le sketch pour en tirer partie.

par Anne-Laure DELPECH | 8 Juin 2016 | arduino
Après l’essai d’un afficheur 7 segments prêté par un collègue du FabLab de Quimper, j’ai acheté un afficheur vraiment pas cher (2.64€ livraison comprise) et je l’essaie.
L’afficheur 7 segments essayé
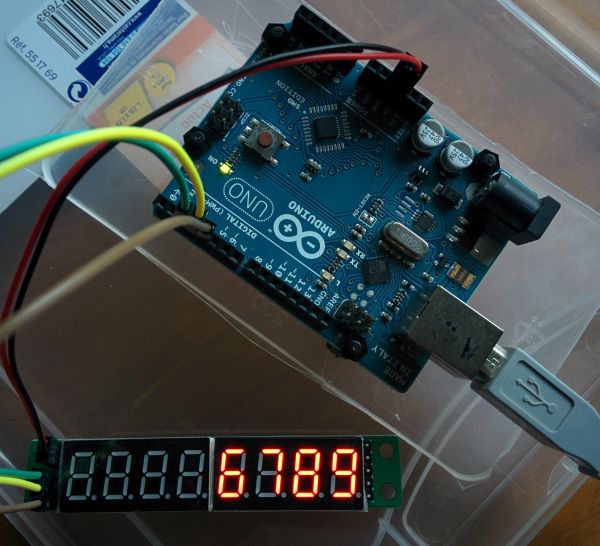
Il s’agit d’un afficheur de marque Toogoo, à 8 chiffres, avec un circuit intégré MAX7219 , disponible ici sur Amazon.fr pour 2.64 €.
Mon objectif
Il s’agit simplement de vérifier que je sais le connecter à un arduino Uno puis vérifier que je parviens à afficher quelque chose avec. Je n’en ai pas encore l’utilité.
Connexion à l’arduino
Après lecture de quelques pages web, dont celle-ci (en anglais, tronixstuff), j’ai compris à quoi servaient les deux jeux de 5 connecteurs présents sur l’afficheur :
Du côté gauche, on trouve les connecteurs qui seront reliés à l’arduino. Du côté droit, on trouve les broches qui permettent de relier d’autres afficheurs identiques en série.
Le circuit MAX 7219 gère jusqu’à 64 leds (soit 8 chiffres de 8 leds chacun avec le point). On peut chainer les afficheurs pour en mettre deux ou trois à la suite.
Pour cet essai, je ne connecte qu’un afficheur de 8 chiffres. J’utilise donc la sortie 5V de l’arduino pour l’alimenter. Mais attention, il est possible que ça ne soit pas faisable s’il y avait plus d’un afficheur, chaque led consommant environ 15 mA (pour du rouge).
Voici les connexions que je réalise :
| afficheur |
arduino |
| VCC |
5V |
| GND |
GND |
| D IN |
2 |
| CS |
3 |
| CLK |
4 |
Programmation de l’afficheur
On utilisera la librairie ledcontrol, téléchargeable sur GitHub, pour les MAX 7219 ou 7221. Pour installer une librairie dans un arduino, voir cet article.
Utilisation de la librairie : cf cette page du site arduino.
Puis j’utilise un sketch exemple de cette librairie (LCDemo7segment). Je modifie simplement les broches utilisées (2, 4 et 3 au lieu de 12, 11 et 10) et ça fonctionne.
Le sketch utilisé : Max7219-7Segment.ino
Le résultat
Et maintenant ?
Je vais utiliser cet afficheur sur le NoRobo prochainement !
par Anne-Laure DELPECH | 8 Juin 2016 | arduino
Les librairies (bibliothèques en bon français) sont du code qui simplifie l’utilisation d’un capteur, d’une fonctionnalité. Elles sont chargées dans l’arduino si nécessaire. Nous allons voir ici comment faire concrètement pour les charger.
Quand charger une librairie ?
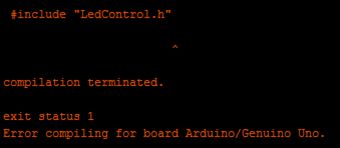 Dès qu’un sketch arduino contient une ligne ressemblant à #include « LedControl.h » , il appelle une librairie (ici la bibliothèque LedControl). Lors de la compilation préalable à la programmation de l’arduino, l’interface arduino vérifie que la librairie est bien disponible. Si ce n’est pas le cas, un message d’erreur s’affiche et l’arduino ne peut pas recevoir le sketch.
Dès qu’un sketch arduino contient une ligne ressemblant à #include « LedControl.h » , il appelle une librairie (ici la bibliothèque LedControl). Lors de la compilation préalable à la programmation de l’arduino, l’interface arduino vérifie que la librairie est bien disponible. Si ce n’est pas le cas, un message d’erreur s’affiche et l’arduino ne peut pas recevoir le sketch.
Il est donc nécessaire de mettre la librairie à disposition de l’IDE avant de lancer la compilation.
Comment faire ?
utilisation du gestionnaire de librairies
Le gestionnaire de librairies permet d’afficher la liste des librairies prêtes à l’emploi ou prêtes à installer. 
Pour plus de précisions, voir ce document arduino.
Importation d’un fichier zip
Si je veux par exemple ajouter la librairie LedControl disponible ici sur GitHub, je clique sur le bouton vert « Clone or download » (1) puis sur « Download ZIP » (2) :

J’obtiens un fichier nommé « LedControl-master.zip ». J’ai deux possibilités : par l’interface arduino ou par l’ajout manuel d’un répertoire.
méthode par l’interface arduino
La plus simple est d’utiliser la fonctionnalité ‘ajouter la bibliothèque zip » de l’interface arduino.
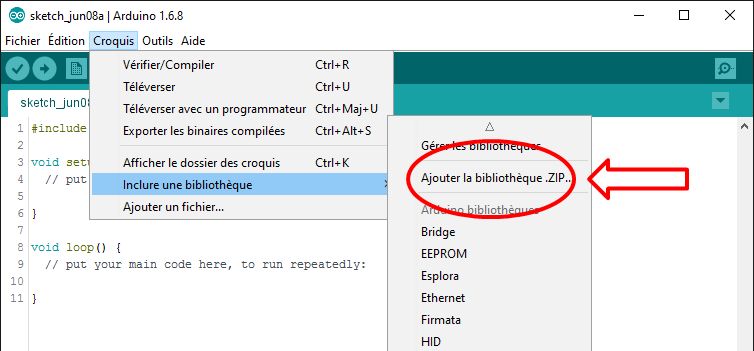
Je clique sur « ajouter la bibliothèque ZIP » puis je choisis le fichier LedControl-master.zip que j’ai téléchargé précédemment. La bibliothèque s’installe et devient visible dans le gestionnaire de bibliothèques.
méthode manuelle
Dans certains cas la bibliothèque contient de nombreuses versions et je ne veux pas toutes les installer. Par exemple, si je n’ai pas d’arduino Yun, je peux éviter d’encombrer mon ordinateur en l’installant.
Dans ce cas,
- fermer l’interface arduino ;
- dezipper le fichier téléchargé et y sélectionner le ou les répertoires que je veux réellement installer (Copier).
- coller ces répertoires dans le répertoire « user/ Documents\Arduino\libraries »
- redémarrer l’interface arduino, la ou les librairies sont maintenant disponibles.

par Anne-Laure DELPECH | 5 Juin 2016 | arduino
Commander deux relais 220 V à partir d’un arduino Nano, avec un téléphone android connecté en bluetooth : c’est possible pour moins de 10 €. Voici le tutoriel complet.
Cet article est l’aboutissement d’un travail d’essais et recherches relatés dans des articles précédents :
Maintenant je fais la synthèse pour une réutilisation dans d’autres configurations.
Avant toute chose, RAPPEL : on travaille avec du 220V et les risques sont réels !

Commander deux relais 220V avec un arduino Nano
Le schéma de connexions :
Les photos du montage :
J’ai enfermé toutes les connexions 220 V dans une boîte en plastique. L’arduino (puis le module bluetooth) sont à l’extérieur de la boîte.
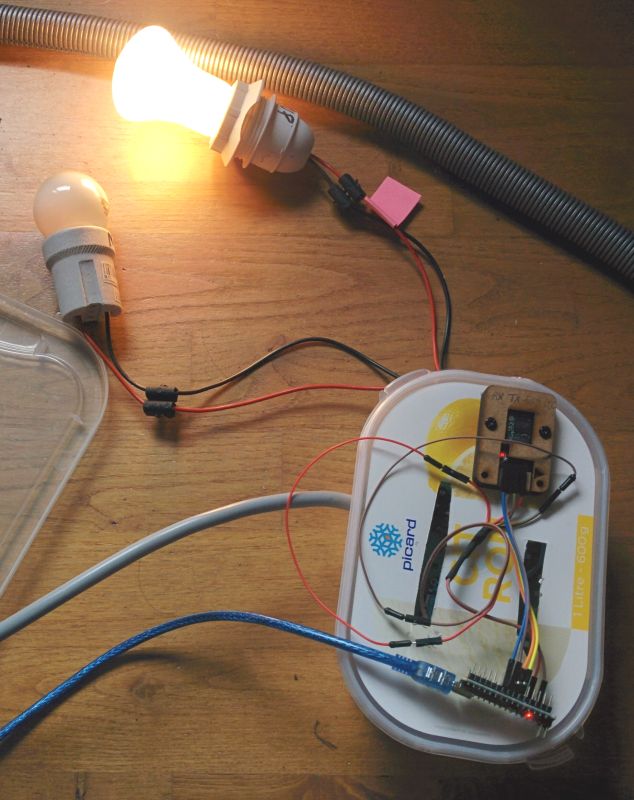
Photo du premier essai :
J’ai préféré brancher l’arduino sur une alimentation USB spécifique (pas mon ordinateur) et je me suis installée sur la terrasse. Noter que la boîte en plastique sécurise bien l’installation 220V.

Le sketch arduino :
test-fanch-relais-new.ino, un sketch qui allume une lampe lorsque le signal envoyé par l’arduino est LOW.
Commander par bluetooth et smartphone Android
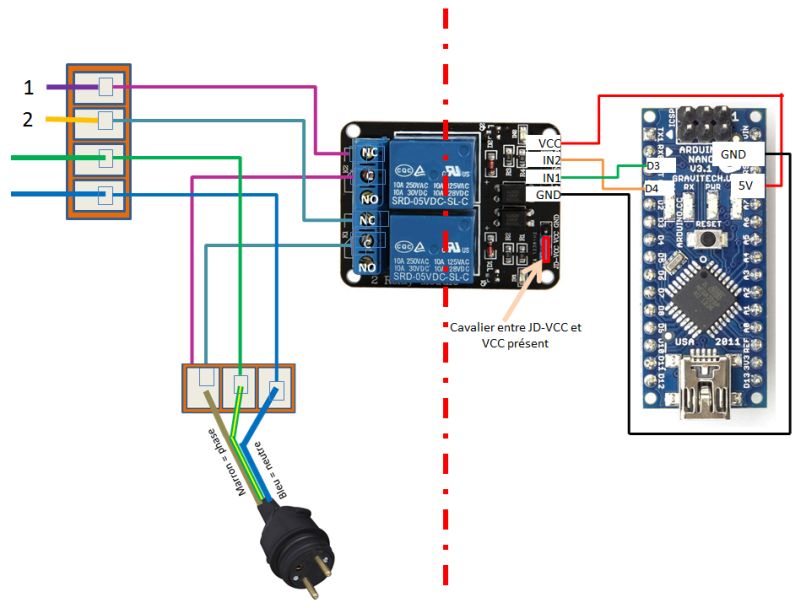
Le schéma de montage (côté faible tension – le cablage haute tension n’est pas modifié) est le suivant :

Quant au sketch, c’est celui que j’ai utilisé précédemment avec deux relais plus gros, mais il y a une différence essentielle : l’allumage est réalisé lorsque l’arduino envoie un signal LOW et non pas HIGH comme avec les autres relais.
Notre nouvel algorithme est donc légèrement différent :
bool up = true; // pas d'ordre de montée
bool down = true; // pas d'ordre de descente
Si up est false ou down est false (il faut bouger le store)
si up est false ET down est false
on a un big problème, le moteur va devenir fou
sinon
allumer ou éteindre selon la valeur de up ou de down
Le sketch qui fonctionne est celui ci : Relais-BT-V1-2016-06-05.ino
Le résultat :
Lorsque j’appuie sur le bouton « UP » de mon smartphone,

la lampe « UP » s’allume !
Et si j’allume les deux boutons à la fois, il ne se passe rien, tout comme s’ils sont tous deux éteints. Tout fonctionne donc correctement.
Et maintenant ?
En cas d’utilisation d’un autre modèle de relais, bien vérifier si c’est un signal LOW ou HIGH qui génère l’allumage.
Pour une utilisation définitive, il faudra réaliser un boîtier plus compact et plus sécurisé. On pourra s’inspirer des plans suivants :
On en profitera pour admirer cette belle boîte qui permet de transporter un arduino Uno et un breadboard sur 3dhubs.
Tout est prêt maintenant pour que Fanch puisse mettre son store chez lui en tant que prototype !

par Anne-Laure DELPECH | 5 Juin 2016 | arduino
J’ai acheté quelques relais 220 V pa chers (2.11 €, livraison comprise) pour arduino. Une commande 5V en provenance de l’arduino déclenche l’ouverture ou la fermeture d’un contact 220V.
Description des relais achetés
Je les ai achetés à la boutique « Universal Color » sur Amazon.fr, au prix de 2.11 € l’unité (voir le produit ici). Le seul inconvénient est que le délai de livraison est de l’ordre de 3 semaines. J’ai vu ensuite qu’on trouve également ce relais double chez TiptopBoard ici pour un prix plus élevé, mais une livraison très rapide. L’avantage de TipTopBoards est qu’il y a un tutoriel d’utilisation, en général bien fait, pour la plupart des produits vendus. Malheureusement dans ce cas, le tutoriel n’est pas précis du tout…
Les relais sont des songle (R) srd 05VDC-SL-C. J’ai trouvé différentes sources d’information, mais aucune qui paraisse complète et fiable… :
How to Set Up a 5V Relay on the Arduino
Et aussi :
- en espagnol, avec un schéma bien fait, pour les raspberry Pi ou arduino, ici
- en français, mais pour alimenter des leds 5V, dans ce tutoriel.
- Voir aussi cet article en anglais, qui semble suggérer que l’isolation n’est correcte qu’en enlevant le cavalier qui relie JD-VCC et VCC
- La description sur ce site de vente en ligne est bien faite et claire. Un site à garder en mémoire car il parait bien documenté, avec des tarifs raisonnables.Un exemple avec des leds dans cet article en espagnol aussi.
- et enfin, cet article qui paraît bien fait, en anglais, qui explique comment brancher une ampoule et la commander par un arduino.
Premiers essais pour comprendre
Comme je veux utiliser ces relais pour des applications 220V, il faut absolument que je comprennes comment fonctionnent ces relais et surtout comment on assure l’isolation totale entre les parties 220V et les parties basses tension.
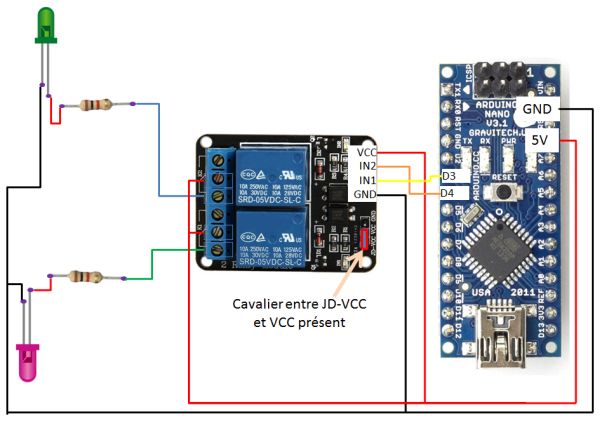
Pour comprendre le principe général, je teste d’abord avec deux leds alimentée en 5V à partir de l’arduino Nano selon le schéma de connexion suivant (résistance 330 à 1000 ohm) :
Le sketch utilisé est une variante du sketch utilisé dans un autre article sur des relais 220V plus chers (arduino et relais pour commander du 220 V).
/*
* test moteur fanch 4/6/2016
*
* !!! NE PAS UTILISER AVEC UN MOTEUR
* --- les deux relais peuvent être sur 1 simultanément dans cette version
* !!!
*
* Nouveaux relais pas chers
* Le relais met sur ON lorsqu'il ne reçoit pas d'impulsion....
* arduino Nano R3
*
*/
const int montee = 3; // broche 3 pour le relais "montée" K1 / led Rouge
const int descente = 4 ; // broche 4 pour le relais "descente" K2 / led verte
bool up = false; // pas d'ordre de montée
bool down = false; // pas d'ordre de descente
char etat = 'S'; // single quote, it's not a constant...
void setup() {
// initialize digital pin 13 as an output.
pinMode(montee, OUTPUT);
pinMode(descente,OUTPUT);
// démarrer le port série
Serial.begin(57600);
Serial.println("Setup fait" );
// vider le buffer RX
// while (Serial.available()) Serial.read();
}
// the loop function runs over and over again forever
void loop() {
Serial.println("------------------" );
Serial.print("UP " );
action_store(true, false); // single quote for string
Serial.print("DOWN " );
action_store(false, true); // single quote for string
Serial.print("BIG PROBLEME " );
action_store(true, true); // single quote for string
Serial.print("Stand By " );
action_store(false, false); // single quote for string
}
void action_store(bool sens1, bool sens2) {
bool red = sens1 ;
bool green = sens2 ;
Serial.print(" | RED : ");
Serial.print(red);
Serial.print(" | GREEN : ");
Serial.println(green);
motor_go(montee, sens1) ;
motor_go(descente, sens2) ;
delay(3000) ;
}
void motor_go(int sens, bool action ) {
digitalWrite(sens, action); // actionne le moteur "sens"
etat = sens ;
}
Ce sketch m’a permis de comprendre comment brancher la sortie des relais :

C = Common, c’est l’arrivée de courant pour l’équipement à allumer ou éteindre. Dans ce schéma en 5V, mais peut aller jusqu’à 220V et 10A.
NC = « normally closed ». Le contact NO est OUVERT lorsqu’on envoie un signal HIGH de l’arduino, fermé lorsque le signal est à LOW
NO = « normally open ». Le contact NC est FERME lorsqu’on envoie un signal HIGH de l’arduino, ouvert lorsque le signal est à LOW
J’ai donc connecté les leds à NO pour qu’elles soient actionnées lorsque l’arduino Nano envoie un signal.
ATTENTION : lorsque l’arduino est éteint, les deux leds ne sont pas alimentées avec ce schéma, mais un test au multimètre montre que le contact est établi entre C et NO, que je laisse le jumper ou non, alors que le contact entre C et NC est bien ouvert. Si je branche les moteurs comme ça, ils vont se retrouver en marche lorsque l’arduino sera éteint…
Le rôle du jumper….
J’ai lu dans plusieurs articles que le jumper JD-VCC vers VCC doit être enlevé lorsqu’on veut isoler parfaitement les deux réseaux, l’un haute tension et l’autre basse tension.
Je crois comprendre à quoi il sert : on peut alimenter le relais avec 5V indépendants de l’arduino si on le souhaite. Dans ce cas, on enlève le jumper et on connecte JD-VCC à du 5V indépendant et GND juste à côté au neutre de l’alimentation indépendante.
Mais avant de tester en 220V, il faut que j’en sois certaine… Je dois vérifier qu’il n’y a pas de contact entre les deux côtés du relais
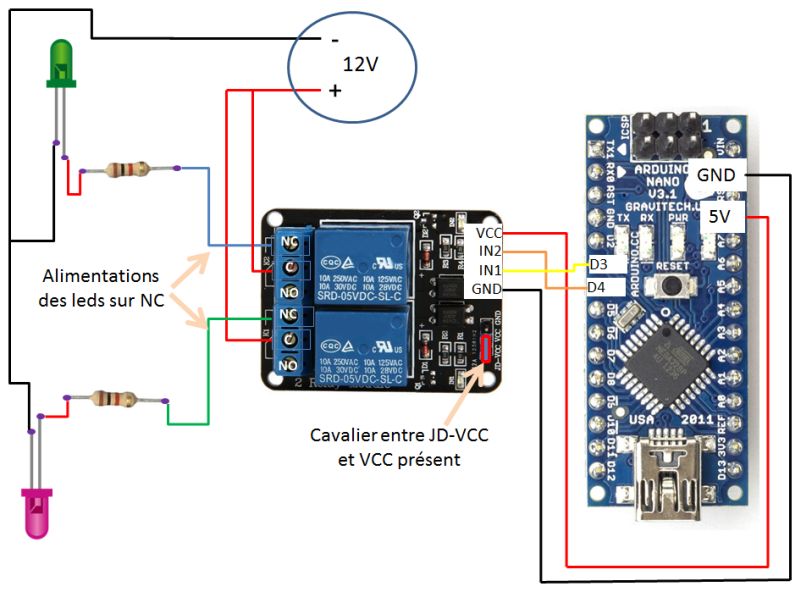
Essai avec des leds alimentées en 12V
Visiblement le jumper a une fonction lorsqu’on utilise une alimentation indépendante pour les équipements relayés. Je fais donc des essais avec une alimentation 5V.
Je vais alimenter le côté des leds par une alimentation spécifique 12V, en mettant les bonnes résistances, je ne devrais pas les casser.
De l’autre côté l’arduino sera en 5V via USB.
Et je testerai d’enlever le cavalier et d’alimenter le relais avec du 5V indépendant.

Ce montage me sert à faire des tests. L’alimentation 12V étant toujours en route, que se passe-t-il quand :
- j’enlève le cavalier entre JST-VCC et VCC
- Je débranche l’alimentation de l’arduino
Lorsque l’arduino est éteint : les led sont toutes deux allumées
Lorsque le cavalier est enlevé : le relais fonctionne (on voit les led de K1 et K2 s’allumer et s’éteindre selon la séquence) mais les leds restent allumées en permanence…
Lorsque le cavalier est enlevé, si je place le +5V de l’arduino sur le JST-VCC ou le VCC de cette zone, avec le GND de l’arduino sur le GND de cette zone, c’est comme si j’avais placé le cavalier.
Conclusion sur un branchement correct en 12V
Le schéma correct de fonctionnement est le suivant (noter que les alimentations des leds sont maintenant connectées à NC et pas NO :
Quant au sketch, il fonctionne correctement avec le contenu suivant :
/*
* test moteur fanch 4/6/2016
*
* !!! NE PAS UTILISER AVEC UN MOTEUR
* --- les deux relais peuvent être sur 1 simultanément dans cette version
* !!!
*
* Nouveaux relais pas chers
* Le relais met sur ON lorsqu'il ne reçoit pas d'impulsion....
* arduino Nano R3
*
*/
const int montee = 3; // broche 3 pour le relais "montée" K1 / led Rouge
const int descente = 4 ; // broche 4 pour le relais "descente" K2 / led verte
void setup() {
// initialize digital pin 13 as an output.
pinMode(montee, OUTPUT);
pinMode(descente,OUTPUT);
// démarrer le port série
Serial.begin(57600);
Serial.println("Setup fait" );
// vider le buffer RX
// while (Serial.available()) Serial.read();
}
// the loop function runs over and over again forever
void loop() {
Serial.println("------------------" );
Serial.print("DOWN - VERT ON " );
action_store(true, false); // single quote for string
Serial.print("UP - ROUGE ON " );
action_store(false, true); // single quote for string
Serial.print("Stand By - Rouge et vert OFF " );
action_store(true, true); // single quote for string
Serial.print("BIG PROBLEME - Rouge et vert ON " );
// action_store(false, false); // Do not run this if le moteur du store est connecté !
Serial.println(" DO NOTHING !");
}
void action_store(bool red, bool green) {
Serial.print(" | RED : ");
Serial.print(red);
Serial.print(" | GREEN : ");
Serial.println(green);
motor_go(montee, red) ;
motor_go(descente, green) ;
delay(3000) ;
}
void motor_go(int sens, bool action ) {
digitalWrite(sens, action); // actionne le relais "sens"
}
Noter que la led rouge s’allume lorsqu’on lui envoie (FALSE / 0) et s’éteint lorsqu’on lui envoie (TRUE / 1).
Noter aussi que j’ai fait en sorte que le cas « big problem » n’allume pas les led pour qu’on ne risque pas de bousiller le moteur des stores si on essaie avec ce sketch.
Dans la console série – réglée à 57600 bauds – on lit en boucle le texte suivant :
——————
DOWN – VERT ON | RED : 1 | GREEN : 0
UP – ROUGE ON | RED : 0 | GREEN : 1
Stand By – Rouge et vert OFF | RED : 1 | GREEN : 1
BIG PROBLEME – Rouge et vert ON DO NOTHING !
Et la led verte s’allume bien lorsque red est à 1 et green à 0
Essais avec du 220V
Maintenant j’essaie avec deux ampoules branchées sur du 220 V !
Mesures de sécurité
Dessiner le schéma de fonctionnement général, en mettant toutes les hautes tensions d’un côté, bien séparées des basses tensions.

Dessiner un schéma utilisant des connecteurs type domino pour simplifier le changement d’éléments commandés.
Mettre tous ces composants dans une boîte. Fermer la boîte avant de brancher la prise et l’arduino.
Bilan :
Ca fonctionne correctement, je ne me suis pas électrocutée et je n’ai pas fait sauter les fusibles de la maison !
Pour voir les photos du montage tel que schématisé ici et pour aller plus loin (commande bluetooth), c’est dans un prochain article.

par Anne-Laure DELPECH | 4 Juin 2016 | arduino
J’ai acheté un arduino nano V3, un tout petit arduino qui ne coûte que 3.66 €, livraison comprise (sur amazon ici) ! Pour ce prix, il est livré avec un cable USB et des connecteurs femelles sont soudés sur la carte, c’est incroyable !
Voici un descriptif de son fonctionnement, très simple.
Fiche descriptive
Voir sur le site arduino, en anglais.
Programmation
L’arduino nano se programme comme un arduino uno classique : on connecte le cable usb fourni à l’ordinateur et à l’arduino puis on ouvre l’interface IDE arduino.
Il suffit de définir le type de carte (dans outils) comme arduino nano. On peut ensuite téléverser un programme dans l’arduino nano. J’ai utilisé l’exemple blink et j’ai bien une led qui clignote sur l’arduino nano (en rouge). Facile !
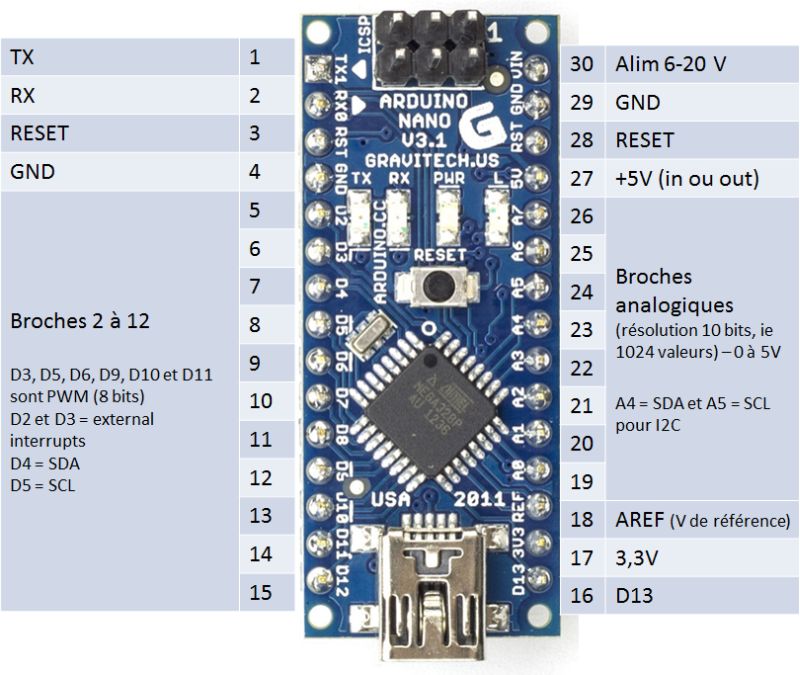
Connexions
Les connexions sont semblables sur le nano et sur le uno, mais moins accessibles sur le nano.
Voici la vue générale :

Et le détail des différents connecteurs :
Et maintenant
Je peux utiliser un arduino nano comme j’aurais utilisé un arduino Uno !
Commentaires récents